Hệ thống giám sát 360 độ xung quanh (360 hệ thống AVM)
Người lái xe luôn gặp phải những vấn đề này: khi lái xe qua một con đường hẹp, rất khó để ước tính phạm vi an toàn để đi qua; khi đậu xe,phạm vi thị giác từ gương mặt xe rất hạn chế, ngay cả chiếc xe có camera nhìn phía sau tích hợp, vẫn có điểm mù với hình ảnh nhìn phía sau; khi lùi lại, một số chướng ngại vật nhỏ và thấp khó nhìn thấy thông qua gương chiếu phía sau,hoặc được phát hiện bởi radar xe hơi...

Hệ thống giám sát 360 độ xung quanh sẽ giúp giải quyết các vấn đề này. Thông qua hệ thống 360 AVM, lái xe có thể xem tình hình xung quanh xe ở 360 độ,để tránh va chạm xảy ra.
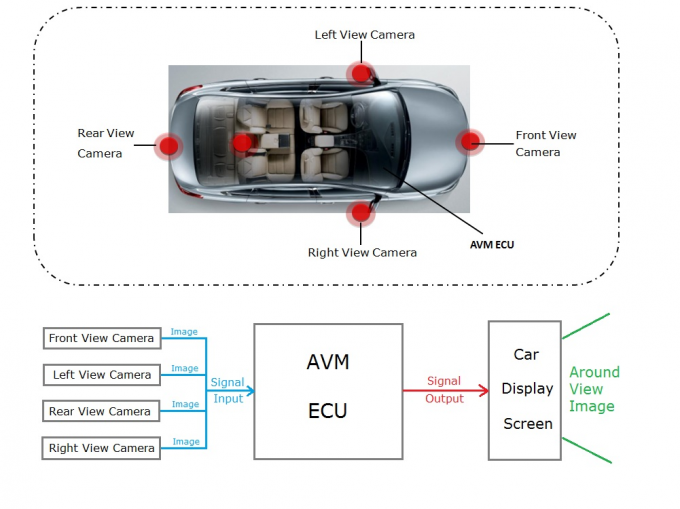
Hệ thống giám sát 360 độ xung quanh ((360 AVM System) bao gồm một đơn vị điều khiển điện tử ((ECU) và bốn máy ảnh. ECU sẽ xử lý hình ảnh được chụp bởi bốn máy tínhmáy ảnh và sau đó xuất ra màn hình hiển thị xe.
Chức năng cơ bản của hệ thống 360 AVM
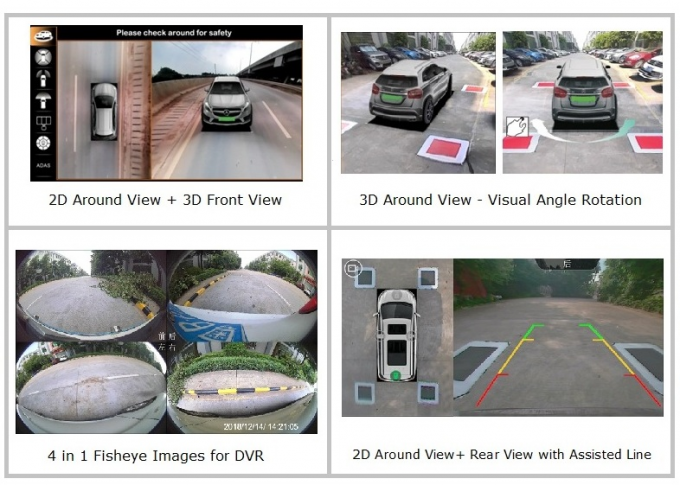
Tôi.2D Around View ((Range: Trước và sau>3m,trái và phải>2m,nối liền)
Tôi.3D Around View
Tôi.4 trong 1 Fisheye Images cho DVR
Tôi.Đường hỗ trợ tĩnh hoặc đường hỗ trợ động cho đậu xe
2) Hiển thị hình ảnh hướng khác nhau
Hệ thống có thể hiển thị hình ảnh từ các hướng khác nhau.

3) Hiển thị 3D xung quanh
Tôi.Hiển thị 3D xung quanh nhìn phía trước, phía sau, trái và phải.
Tôi.Hiển thị chuyển đổi theo chuyển đổi bánh răng, thay đổi tốc độ, hoạt động của người lái xe, tín hiệu rẽ vv
Tôi.View có thể được xoay trong 360°xung quanh xe.
Tôi.Mô hình xe trong video sẽ thay đổi hướng theo hướng lái thực tế.

4) Xem thay đổi
Hệ thống sẽ thay đổi tầm nhìn khác nhau theo tín hiệu quay, chuyển số hoặc nút AVM trên điều khiển trung tâm của xe.
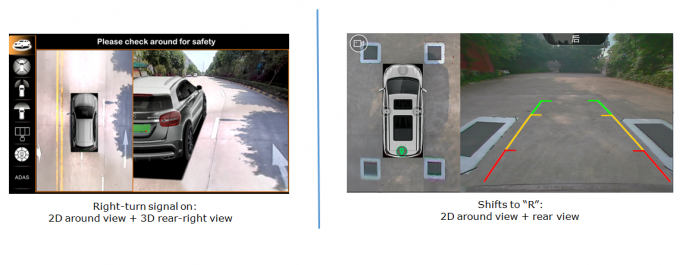
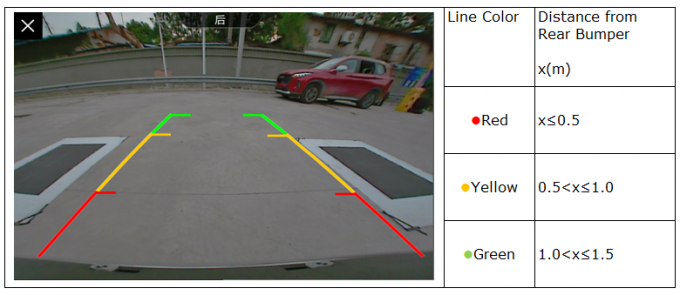
5) Đường hỗ trợ tĩnh hoặc Đường hỗ trợ động để đậu xe
Khi người lái xe chuyển số sang "R", hệ thống sẽ hiển thị 2D xung quanh nhìn và nhìn phía sau.đường hỗ trợ tĩnh hoặc đường hỗ trợ động sẽ xuất hiện để hỗ trợ lái xe đậu xe hoặc lùi lại.
Bên cạnh chức năng cơ bản, hệ thống 360 AVM có thể được thực hiện cho nhiềuADAShỗ trợ lái xebao gồm:
1) Quan điểm toàn diện dưới xe (CandidTech độc quyền bằng sáng chế)
Chức năng này có thể hiển thị toàn bộ địa hình, để giúp lái xe tránh các hố lớn và đá trước khi lái xe off-road.

2) Nhìn góc rộng
Hệ thống có thể hiển thị góc rộng trong thình ảnh phân chia lại, tầm nhìn đường chân trời đóng200°.

3) Cảnh báo từ xa bằng radar siêu âm
Hệ thống AVM không bao gồm radar, xe phải được eđùa với radar Hoặc chúng ta có thể sau khi tải radar theo yêu cầu của khách hàng.



4) Chức năng DVR
Hệ thống AVM có thể lưu trữ các video từ 4 máy ảnh và đầu ra thành hình ảnh 4 trong 1 cho chức năng DVR.
Thẻ lưu trữ được hỗ trợ: Thẻ TF, định dạng FAT32, tối đa 32GB.

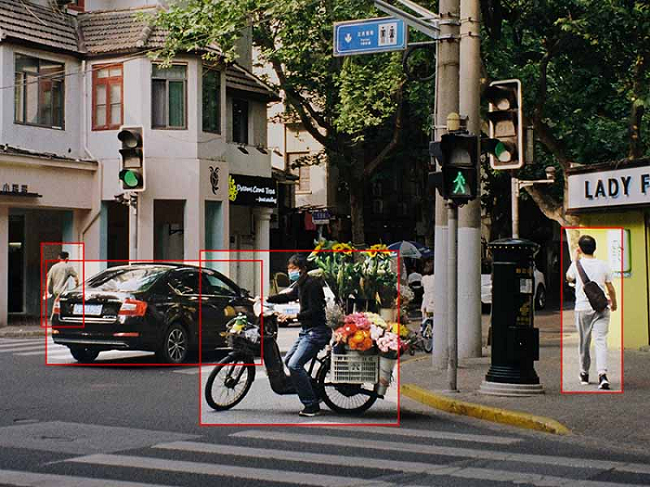
Phát hiện đối tượng chuyển động (MOD)
Khi đậu xe hoặc khởi động xe, thông qua iCông nghệ nhận dạng mage,các360 SHệ thống VM có thểphát hiện vật di chuyển xung quanh xe và cảnh báo người lái xe để điều chỉnhhành vi lái xe.
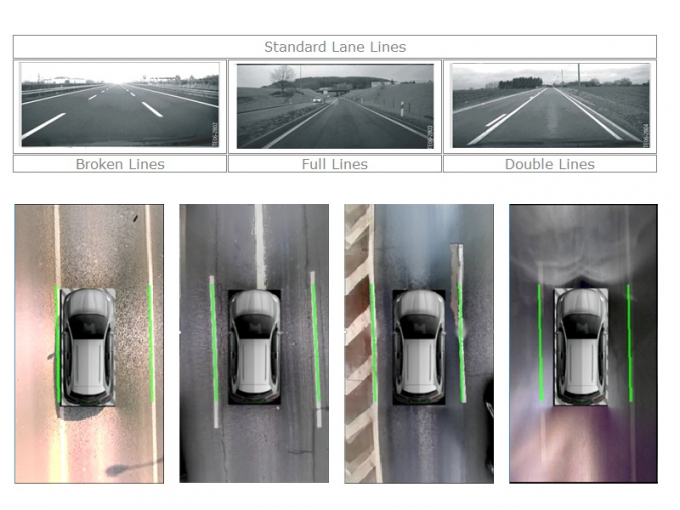
LaneDmở cửaWarningSystem(LDWS)
Khi tốc độ xe nhanh hơn 50km/hcó thể tùy chỉnh), hệ thống AVM sẽ xác định đường làn đường tiêu chuẩn theo cách nhìn 2D xung quanh.
Nếu tài xếlệchĐánhtừ làn đường ban đầu bất tỉnhly ((không sử dụng tín hiệu quay), hệ thốngcó thể báo độngtrên0.5 giây trước khi rời làn đường, để nhắc lại cho tài xếđối với bước khởi hành làn đườngtình hình của xe, cung cấp thời gian phản ứng nhiều hơn cho người lái xe, giảm đáng kể va chạm gây ra bởi lệch làn.
Lưu ý: Tất cả các chức năng trên có thể được lựa chọn tự do, các chức năng hệ thống hỗ trợ tùy chỉnh.


